


Sie sind hier bei www.ostron.de/Licht & Optik / Optische Messtechnik
- U-I-R-Messtechnik
- Signalgeneratoren
- Frequenzmesser
- Oszilloskope
- Analyzer & Wobbler
- Leistungsmesstechnik
- R-L-C-Messtechnik
- Prüftechnik, Spezialmesstechnik
- Energieversorgung
- Funktechnik
- Radar & GHz
- NF & HiFi
- Licht & Optik
- Steuer- & Regelungstechnik
- Telefonie & Kommunikation
- Mechanik
- Avionik
- Sammeln & Seltenes
- Bauelemente
- ...
- Röhrenliste
- Manuals & Schaltpläne
- sonstiges...
Informationen
Kennen Sie schon... ?

Artikel 13 / 60
Artikeldetails

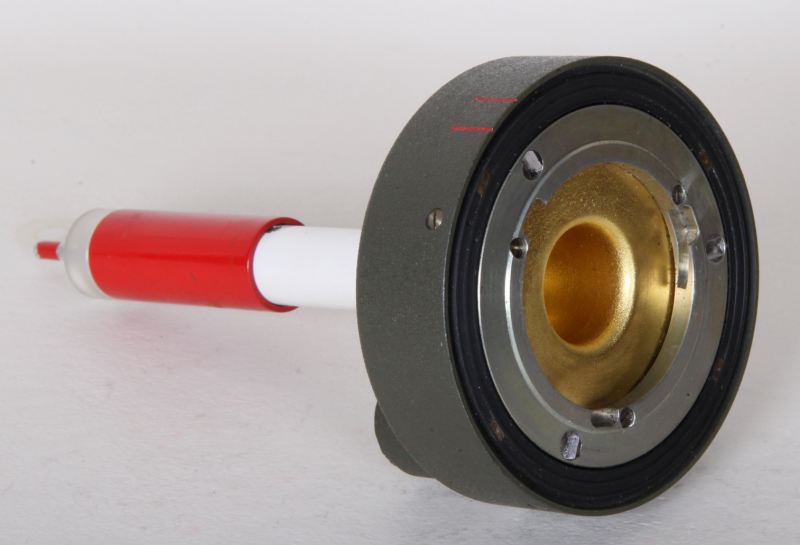
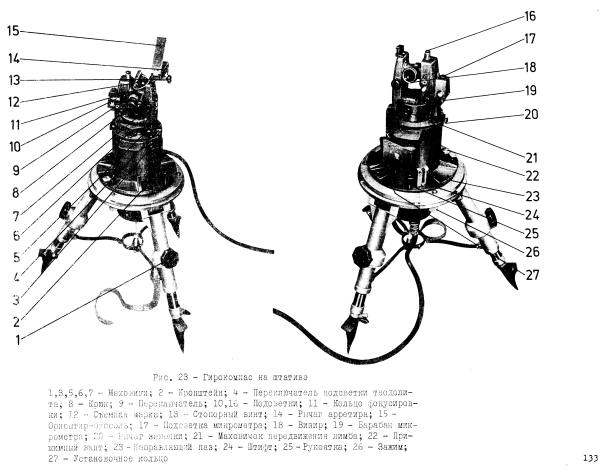
Kreiseltheodolit Gi-E1
Art.Nr.: opt-0024-b
russischer Kreiseltheodolit Gi-E1, russ.Bez. Ги-Е1



Kreiseltheodolit Gi-E1
Rarität: militärischer Artillerie Kreiseltheodolit, Gyrotheodolite Gi-E1!
Ги-Е1 Артиллерийские гирокомпасы
link wikipedia: Kreiseltheodolit
Der GI-E1 ist ein militärischer Kreiseltheodolit für die Artillerie. Das Herzstück des Kreiseltheodoliten (auch Vermessungskreisel oder Gyrotheodolit genannt) bildet ein kardanisch aufgehängtes Pendel in welchem ein elektrisch angetriebener Kreisel rotiert, der eine präzise Richtungsweisung im Raum ermöglicht. Diese Nordweisung des Kreisels bildet die Referenz für die Ausrichtung und Orientierung des aufgesetzten Theodoliten.
Die Kreiseltheodoliten arbeiten sehr präzise und sind dank des Kreiselprinzips unabhängig vom magnetischen Nordpol der Erde.
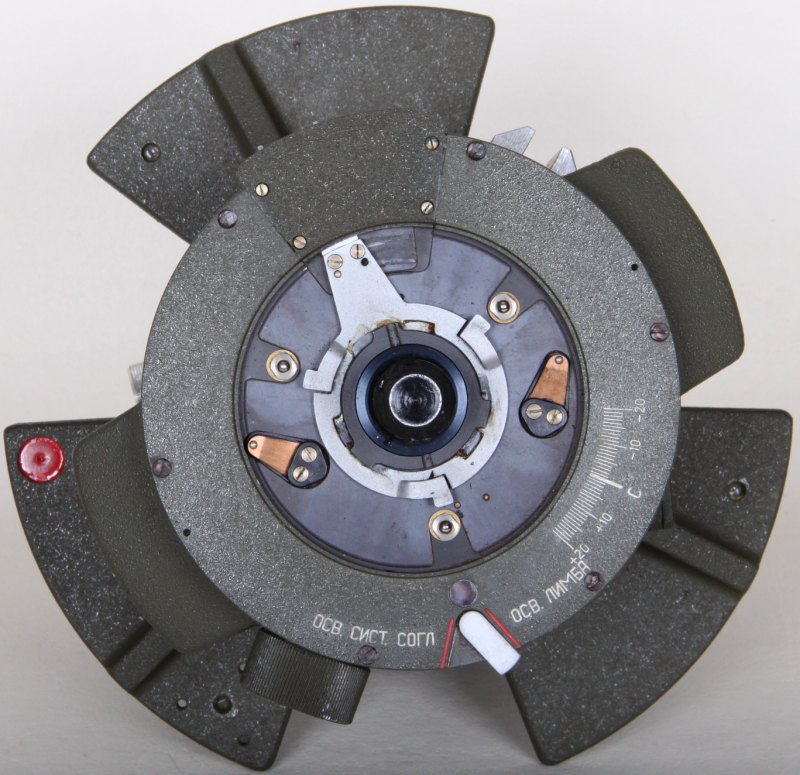
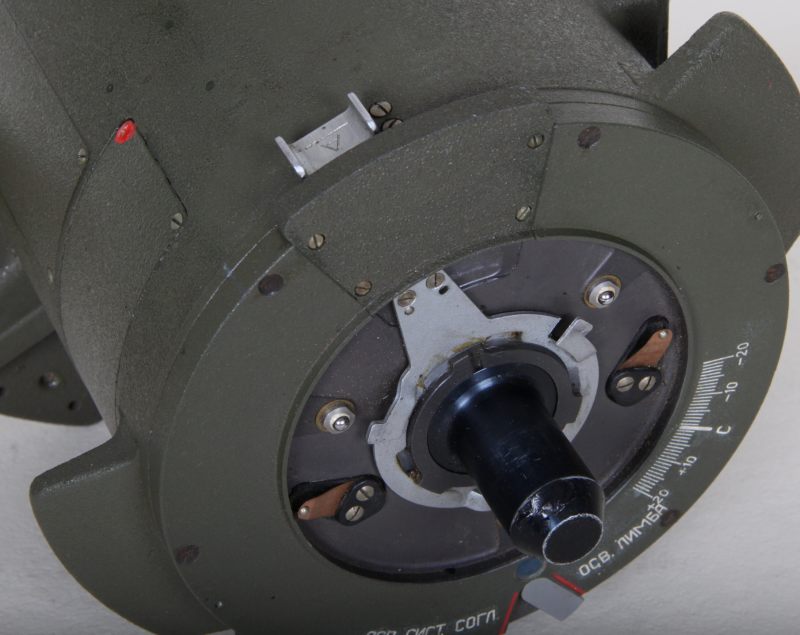
Die Rotationsachse des Kreiselteodoliten richtet sich unter dem Einfluss der Schwerkraft und der Erddrehung auf Astronomisch-Nord aus. In diesen richtungsgebenden Teil, dem sogenannten Kreisel ( siehe Bilder 4 bis 7 ), nimmt ein Theodolit ( siehe Bilder 1 bis 3 ) die Kreiselrichtung ab und setzt sie zu seinem Horizontalkreis in Beziehung.
In einer Einheit zusammengebaut ergeben Kreisel und Theodolit den Kreiseltheodoliten, oder der Kreisel kann auf den Theodoliten bei Bedarf aufgesetzt werden (Aufsatzkreisel).
Der Kreiseltheodolit GiE1 ist ein Spezialgerät für das Markscheidewesen, für die Vermessung von Tunneln oder auch für militärische Anwendungen.
Versand für diesen Kreiseltheodolit Gi-E1 mit seinem umfangreichen Zubehör auf Anfrage.
















Tatsächliche Peilung wird gemessen:
- Auf dem Boden (Kreiselkompass und Instrumente für astronomische
Beobachtungen);
- Auf der Karte (der rechte Rand der Karte - die Richtung der wahren Meridian).
Die magnetischen Azimut Am - entlang der horizontalen Winkel gemessen
im Uhrzeigersinn von 0 bis 00 auf 60-00 Kontrolle zwischen dem Nord-Richtung
der magnetische Meridian einem gegebenen Punkt und Richtung des Objekts (3b).
Die magnetischen Azimut wird durch Instrumente auf der Erde mit einem Magnetfeld gemessen
Pfeil (Kompass, Kompass, etc.)
Azimutwinkel α - eine horizontale Winkel entlang der gemessene
im Uhrzeigersinn von 0 bis 00 auf 60-00 Kontrolle zwischen dem Nord-Richtung
vertikalen Gitterlinien einem gegebenen Punkt und Richtung
Objekt. Azimutwinkel wird auf der Karte mit gemessenen
Artillerie-Bereich, ein Winkelmesser, hordouglomera.
Die magnetische Deklination δ - Winkel zwischen der wahren und
die magnetischen Meridian an einem bestimmten Punkt. Wenn eine Magnetnadel
weicht von der wahren Meridian nach Osten, die Deklination der östlichen
(Aufgenommen mit einem Plus-Zeichen), wenn im Westen - Westen (Fall mit
Minuszeichen).
Die Konvergenz der Meridiane γ - der Winkel zwischen der Richtung des Nordens
der wahre Meridian und die vertikale Linie des Rasters in dieser
der Punkt. Wenn die vertikale Rasterlinie weicht im Osten des wahren
Meridian, das Zusammenwachsen von Ost (aufgenommen mit einem Plus-Zeichen), wenn die
West - West (aufgenommen mit einem Minuszeichen).
Abänderung Richtung Montag - der Winkel zwischen der Richtung der N
vertikalen Gitterlinien und der Richtung des magnetischen
Meridian. Es ist gleich der algebraischen Differenz des Magnetfelds und
Konvergenz der Meridiane:
Mo = (± δ) - (± γ). (1.31)
Die Werte von Au, Am, und α wird durch die Formel berechnet:
Au = Am + (± δ); Am Au = - (± δ); α = Am + (± PI), (1.32)
Au = α + (± PI), Am = α - (± Mo); α = Ax - (± γ).
Die Werte von δ, γ, Mo von der Karte entfernt.
1.4. Füllen Sie Kreiselkompass
Die komplette Kreisel besteht normalerweise aus:
- Eigentlich der Kreisel;
- Stand Kreiselkompass;
- Netzteil (Sender);
- Batterie-Kreiselkompass;
- Elektroveha;
- Batterie-elektrovehi;
12
- Verlegen Kisten und Taschen;
- Ersatzteile;
- Technische Dokumentation.
1.5. Klassifikation der Artillerie Kreiselkompass
Durch die Art der Aufhängung:
- Liquid (AH, 1G5);
- Mit Torsionsaufhängung (1G9, 1G11, 1G17, GI-E1, 1G25, 1G25-1);
- Mit einer magnetischen Lagerung (1G40, 1G47).
Durch die Art der Anzeige:
- Digital (GI-E1, 1G40, 1G47);
- Auf der Extremität (1G5, 1G9, 1G11, 1G11N, 1G17);
- Kombiniert (1G25, 1G25-1).
Änderungen der Kreiselkompass 1G17 1G25-1-1 in der verwendeten
Panzer-Navigationsgeräte, ein Stativ und müssen nicht
installiert auf der Installations-Tabelle (z. B. BRDM-2px, Rahm).
1.6. Die Leistungsmerkmale der Kreiselkompass
Die wichtigsten Leistungsmerkmale der Kreiselkompass Darstellung
Lena in der Tabelle 1.
Tabelle 1
Anzahl der charakteristischen Art Kreiselkompass
p / n 1G11 1G17 1G25 1G40 1G47 GI-E1
Die Genauigkeit der
Azimutrichtung
1 (mittlerer Fehler):
- Zwei-Punkt-Umkehr 0-00,3 20 "0-00,5 0-00,5 0-00,5 ± 3,9
- Drei-Punkt-Umkehr 0-00,2 -----
- Vier-Punkt-Umkehr ------
Zeit zu bestimmen,
Azimut (die mit der Bereitstellung,
2 von Gyro):
- 2-Punkt-Umkehr 12 min 12 min 10 min 7 min 4 min -
- 3-Punkt-Umkehr 16 Minuten -----
- 4 Punkte Reversion ----- 7 min
3 Feld 2ω 3 ° 3 ° 3 ° 3 ° 3 ° 2 ° 30 '
4 Vergrößerung GT 12,6 x 12,6 x 12,6 x 12,6 x 12,6 x 8x
5 Temperaturbereich
von ± 50 ° ± 50 ° ± 50 ° ± 50 ° ± 50 ° ± 50 °
Set Gewicht, 115 kg 133 kg 80 kg 140 kg 140 kg 105 kg
6,:
- Gewicht des Kreisels in der Verpackung von 27 kg 40 kg ----
- Gewicht des Kreisels ohne Stapeln 20 kg - 23 kg 37,4 kg 16,6 kg -
M und P e und h e. Mittlerer Fehler ungefähr gleich zwei Drittel der mittleren quadratischen Fehlers.
13
KAPITEL 2. Hintergrund der Theorie von Kreiseln
2.1. Die Parameter und die Bewegungsgleichung des Kreisels
Drei-Stufen-freien Kreisels hat die Möglichkeit der Revolution in
drei Ebenen. Diese Drehung wird durch eine spezielle Art der Konstruktion gewährleistet
Drei-Stufen-Federung.
Drei-Stufen-Gyroskop (Abb. 2a) hat die folgende Achse:
- Die Hauptachse des Kreisels X - Drehachse symmetrischen
Trägheitskörper (durch den geometrischen Mittelpunkt);
- Präzessionsachse Z - vertikale Achse kardanisch in
Lageraußenring;
- Axis Stabilisierung Y - horizontale Achse kardanisch in
Lagerbasis.
Im freien Kreisels, sind alle drei Achsen senkrecht zueinander und
in einem Punkt schneiden. An diesem Punkt, der Schwerpunkt des Rotors
und kardanischer Ringe. Die Reibung in den Lagern der Achsen der Suspension aus der freien
Kreisel ist klein (Null). Wenn der Rotor frei
Gyroscope ankündigen schnelle Drehbewegung (Rotation) um die
seiner Hauptachse, wird es gyroskopischen Eigenschaften:
- Stabilität;
- Präzession;
- Gyroscopic Reaktion.
Nachhaltigkeit - die grundlegende Eigenschaft eines Kreisels. Die Hauptdrehachse
bemüht sich, seine gegenwärtigen und ursprünglichen Position zu halten
räumlich konstant. Die Stabilität des Gyroskop
größer, je größer sein Drehimpuls:
H = j ⋅ Ω, (2.1.1)
wo J - Trägheitsmoment um die Achse seiner Zeit; Ω - eckig
Rotordrehzahl.
Drehimpuls - eine Vektorgröße, die Richtung seiner
bestimmt durch die Seite des Rotors.
Die Stabilität wird auch durch den Grad des Gleichgewichts beeinflusst
Rotor sowie der Reibungskoeffizient in seiner Suspension.
Präzession - die Abweichung der Hauptachse des Kreisels zur Seite,
senkrecht zu der Richtung des Aufpralls der störenden Kraft.
Um die Richtung der Geschwindigkeit und Richtung der Präzession zu bestimmen
betrachten die Bewegung im Bild. 4a.
Die positive Richtung des Vektors H bezieht sich auf
Drehung des Rotors des Kreisels ist ersichtlich, gegen den Uhrzeigersinn werden. Vektor
auf einen Punkt, das heißt die Pole des Kreisels.
14
a) b)
In Abb. 4. Parameter des Drei-Stufen-Bewegung des Kreisels:
a) Die Richtung des Präzessionsdrehzahl und b) die Kreiselmomente und Kraftmomente
Trägheit.
Anwendbar auf den Vektor H Störkraft FB. Das Moment dieser Kraft
In der M auf der anderen Seite gesendet werden (in der Polstärke), die unter ihrem Einfluss
Rotationsachse des Kreisels sichtbar wäre gegen den Uhrzeigersinn haben. Unter
Im Moment ist die Wirkung von M wird sich ändern Schwung
Bewegung des Kreisels:
dH
= MW. (2.1.2)
dt
Aus der elementaren Vektor des Dreiecks haben wir:
dH = H ⋅ dα, (2.1.3)
wo dα - ein unendlich kleiner Winkel der Präzession.
Die Geschwindigkeit der Veränderung in der Präzessionswinkel ω ist die Ableitung von α:
dα
= Ω. (2.1.4)
dt
Setzt man in Gleichung (2) (3) und (4), erhalten wir:
In der M = H ⋅ ω. (2.1.5)
Aus den theoretischen Mechanik bekannt ist, dass das Vektorprodukt
alle Vektoren senkrecht zueinander sind. Die Richtung des Vektors ω ist
senkrecht zu der Ebene, in der die Vektoren in T und H:
M
&ohgr; p = B. (2.1.6)
H
Bereiche der Präzession wird durch die Regel bestimmt: die Aktion
Pol der angelegten Kraft des Kreisels ist der kürzeste Abstand der
Polstärke.
Gyroscopic Reaktion - die Entstehung eines freien Kreisels
unter dem Einfluß eines künstlich durch die Präzessionsbewegung erstellt
Da S, gleich in Größe und umgekehrter Richtung zu
15
Stören der Zeit, würde das zu einer Präzession
Bewegung:
S =-M B = - H ⋅ ω. (2.1.7)
Betrachten wir die Gleichungen der Bewegung des Kreisels, mit Abb. 4b.
Führen Sie die Differentialgleichungen der Bewegung des Kreisels enthalten
nichtlinearen Terme, und ihre Lösung kann nur auf der Grundlage gefunden werden
Näherungsverfahren verwenden. Allerdings zeigt die Analyse, dass mit
hohen Grad an Genauigkeit die Lösung dieser Gleichungen gefunden werden
wenn wir ignorieren die nichtlinearen Terme. Dies wird durch die Tatsache erklären, dass
moderne technische Gyros:
- Entlang der Z-Achse des Kreisels in der vertikalen Ebene durch den Winkel Bewegen
β klein genug ist;
- Winkelgeschwindigkeit von α und β sind auch relativ klein.
&&
Daher gehen wir davon aus, daß die Sünde β = β, cos β = β, φ = Ω = const.
Dann wird das System von Differentialgleichungen der Bewegung des Kreisels
kann wie folgt geschrieben werden:
&&
A 0 ⋅ β ⋅ α + H = M x; ⎫
& ⎪
& ⎬, (2.1.8)
B0 ⋅ α - H ⋅ β = M η, ⎪
&& ⎭
wobei A 0 = A + A1, B0 = B + B1 + B2;
A, B - äquatorialen Trägheitsmomente des Rotors relativ zu den Achsen X
und Y sind;
A1, B1 - Trägheitsmomente des Innenrings relativ zu der Suspension
Achsen X und Y sind;
H = C ⋅ Ω - der Drehimpuls der Trägheit des Rotors;
C - axiale Trägheitsmoment des Rotors;
MX, MY - Momente der äußeren Kräfte, die auf den Kreisel
relativ zu seiner Achse.
Gleichung (2.1.8) ist ein System von Gleichungen technische
Bewegung des Kreisels um einen festen Punkt.
&&
In dem System (2.1.8)-Komponenten der Momente A 0 ⋅ β ⋅ α und B0
&&
&
sind die Trägheitsmomente Kräfte, und H und H ⋅ α ⋅ β - gyroskopischen Momente.
&
Technische Gleichungen sind für die praktische Verwendung und
hinreichende Genauigkeit.
Es sollte berücksichtigt werden, dass die oben genannten Spezifikationen der Gleichung
für den Fall gemacht, wo der Winkel β klein genug ist. Für große
Werte des Winkels β der Gleichung kann in den technischen Daten wie folgt geschrieben werden:
&&
A 0 ⋅ β + H ⋅ α ⋅ cos β = M x; ⎫
& ⎪
⎬ (2.1.9)
&&
B0 ⋅ α - H ⋅ β ⋅ cos β = M η. ⎪
&& ⎭
&&
In den Berechnungen vernachlässigt den inertialen Begriffe A 0 ⋅ β, B0 ⋅ α und &&
werden verkürzt technischen Gleichungen:
16
H ⋅ α = M; ⎪
& ⎫
& ⎬ (2.1.10)
-. H ⋅ β = M η ⎪
⎭
Diese Gleichungen liefern die notwendige Genauigkeit der Berechnungen mit
Bestimmen Sie die Fehler der modernen Artillerie gyroskopischen
Geräte.
2.2. Das Prinzip des Kreisels
Bestimmung der Azimuth-Richtung durch Orientierung
Kreisel wird auf die Bestimmung gyroskopischen Weise reduziert
der wahren Meridian-und Azimut-Berechnung Orientierung
Richtung.
Die Richtung der wahren Meridian mit dem Kreisel
Beobachtungen Vibrationssensor. Empfindlich
(SE) (5a) ist ein Pendel gyroskopischen, dh Gyroskop, das
Von der Mitte der Schwerkraft, die unter dem Punkt der Unterbrechung. In der Schaukel
Hauptachse des Kreisels X-X Kreisel führt harmonische
Schwankungen bezüglich der Ebene des Meridians. Dieses Phänomen ist
die folgenden Eigenschaften des Kreisels:
1) Die Hauptachse des Kreisels X-X zielt darauf ab, behalten unverändert ihre
Position im Welt-Raum;
2) wenn die Achse x-x zu befestigen ein Paar von Kräften F-F (5b), die Achse des Kreisels
Unter der Wirkung dieses Paar von Kräften wird gedreht
(Precess) in der Ebene P senkrecht zu der Ebene N.
Die Richtung der Präzession mit der Richtung der Kraft F zusammenfallen,
um 90 ° in der Drehrichtung des Rotors des Kreisels.
a) b)
In Abb. Fünf. Das Sensorelement (a) und pretsessirovanie Kreiselachse (b)
17
Lassen Sie die Anfangszeit-Achsen-Gyroskop horizontal ist, und
befindet sich in der Äquatorialebene, dh in der Richtung
"Ost-West" (Abbildung 6, die Position I). An dieser Stelle, vorbei an der Linie
durch die Suspension Punkt D und dem Schwerpunkt C SE, mit der vertikalen
Raum, dh Reaktion auf die Aussetzung der Q und R sind die Gravitationskraft auf einer geraden Linie
und in entgegengesetzten Richtungen, dh gerichteten bilden keinen Punkt.
In Abb. 6. Das Funktionsprinzip des Kreisels Pendel
Durch die tägliche Rotation der Erde nach einem Zeitraum von
Zeit einen bestimmten Winkel drehen. Die Achse des Kreisels in der ersten
Eigentum (Eigentum der Stabilisierung) bleibt parallel zu seiner
ursprünglichen Position und nimmt Stellung II. In diesem Fall wird die Kraft F
und Q bilden einen Punkt um die Hauptachse des Kreisels X-X, die
führen Präzession um die vertikale SE, so dass das Ende sein wird
auf uns zu wenden, das heißt, im Norden, und am Ende - nach Süden.
Mit einer weiteren Drehung der Erde wird am Ende ein
über dem Horizont steigt, und am Ende - nach unten. Wert
Dynamik des Paars von Kräften und die Drehzahl der Sensor um die
Vertikal wird zunehmen und erreichte ihr Maximum
Wert, wenn die Achse des Kreisels in der Meridianebene (Lage sein
III). In dieser Position wird das Ende einer Kreiselachse maximal sein
erhöht über dem Horizont, und am Ende - wie ausgelassen wird (die Art von
Pfeil F). Mit weiteren Drehung der Erdachse Kreisel kommen aus der
Meridianebene und nehmen Sie die Position IV. Das Ende der Achse des Kreisels wird sein
Übersiedlung in den Westen, und am Ende - nach Osten.
In der Zukunft, in Verbindung mit der Drehung der Erde Enden A und B werden
näher an der Ebene des Horizonts, und natürlich wird eine Zeit kommen
18
Wenn die Gyroskop-Achse mit der Ebene des Horizonts (Position V). In
Diese Position ist die Zeit ein Paar von Kräften Null, dh kommt ein Punkt
Reversion. Nach einer gewissen Zeit (in Übereinstimmung mit
erste Eigenschaft eines Kreisels) SE nimmt die Position VI.
In dieser Position hat das Ende der A-Achsen-Gyrosensor unter weggelassen werden
Ebene des Horizonts, und am Ende wird über den Horizont erhoben werden
(Das Gegenteil der Situation II), dh Sensorelement wird
bewegen (präzedieren) in die entgegengesetzte Richtung.
Somit wird die SE machen das Pendel Kreiselkompass
periodischen Schwingungen relativ zur Ebene des Meridians. Zeit
Schwingungen hängt von der geographischen Breite und der Umgebungstemperatur (siehe
adj. 1-4). Da der Abstand vom Äquator der Schwingungsperiode Anstieg
ting.
Im Allgemeinen werden die Präzessionsbewegung Schwingungen aufgrund der Anwesenheit von SE
verschiedenen Widerstandskräfte, vor allem die Unterstützung von Flüssigkeit,
überholt sind und nicht in Bezug auf symmetrische
die Ebene des Meridians. In dem Verfahren der Bestimmung des Azimuts dieser Zerfall
zu berücksichtigen, vorgesehen sein, dass die Verfahren zur Bestimmung
verschiedenen Azimut Kreiselkompass.
In der Kreiselkompass und 1G9 1G11 keine Wartung Flüssigkeit
Sensorelement auf einer Torsionsaufhängung Band suspendiert
Typen. Um den entgegenzuwirken Torsionsmoment auf die Schwingungs beseitigen
SE-Tracking-System verwendet, so dass die Dämpfung von Schwingungen
SE minimiert wird.
An Stellen, wo der Betrachter nimmt die Beendigung des SE-Verkehr
(Stopp), ändert die Achse des Kreisels die Richtung der Bewegung
das Gegenteil. Deshalb werden diese Punkte genannt Umkehrpunkten.
Wenn der Kreisel-Pendel ist nicht jeder Widerstand Kraft, die
Reversion Punkt symmetrisch zur Ebene liegen
Meridian. Unter diesen Umständen, um zu bestimmen, die Richtung der wahren
Meridian ist genug, um die zwei benachbarten Umkehrpunkten fixieren und nehmen
dazwischen.
Fixieren der Positionen der Wendepunkte ist, indem durchgeführt
goniometrischen Lesungen auf der Skala. Die Anzahl der Richtung entspricht,
der wahre Meridian, ist das arithmetische Mittel aus den Ablesungen
Rückfall in die Punkte.
Um grobe Fehler zu beseitigen und verbessern die Genauigkeit der durchschnittlichen Anzahl,
entsprechend der Richtung der wahren Meridians, bestimmt durch
drei, vorzugsweise vier-Punkt-Umkehr.
In 1G5 Kreiselkompass empfindliche Element schwimmt in der Flüssigkeit.
Flüssigkeitsreibung verursacht Dämpfung SE. Es
Verfahren berücksichtigt die Dämpfung in der Definition der Azimut.
19
KAPITEL 3. ARTILLERY Kreiselkompass 1G11
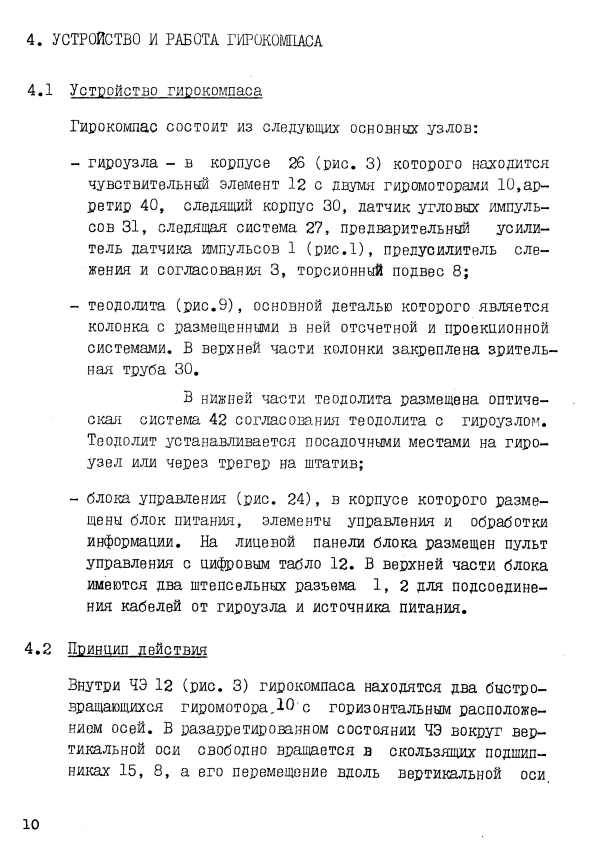
3.1. Beschreibung des Gerätes Gerät gesetzt Kreiselkompass 1G11
Kit 1G11 Kreiselkompass Geräte gezeigt. 6. Richtig
Kreiselkompass besteht aus girouzla und richten den Kopf.
Girouzel besteht aus folgenden Teilen:
- Sensor 7;
- Servo-Gehäuse 13;
- Dreifuss 24;
- Block-Lager 10;
- Mechanismus zur Führung in Azimut 22, 23;
- Rechtssache 37.
In Abb. 6. Füllen Sie Kreiselkompass 1G11:
1 - Sichtung Kopf, 2 - Stopfbuchse für den Kreisel, 3 - Batterie
Akku 12SLM-28, 4 - Stromversorgung: 5 - für die Fernbedienung Griff
Bewegen des Grid Reference System Kreisel, 6 - girouzel 7 - Stativtasche
Kreiselkompass, 8 - eine Kiste mit Ersatzteilen, 9 - Batteriekasten AC-8, 10 - AK-Batterie
8, 11 - elektroveha, 12 - Urteil elektrovehi 13 - Stativ.
Das Sensorelement (7) girouzla wirkt als Kreisel-
und das Pendel ein Zylinder ist, der untere Teil der
angeschlossene Kamera giromotorom 1. Das Sensorelement ist suspendiert
auf einem Förderband Wagen 9 auf den Torsionsstab 12, der entlang der Achse bewegen kann
ZZ Zeuge in dem Fall.
In den Zeugenstand (SC) sind Sensor-Tracking-System fixiert,
Käfighaltung Mechanismus und eine horizontale Reichweite von 15. Sensor-Tracking
System besteht aus einem Rohr 31, der Kondensator 30, das Prisma 29, Linse 27,
28, Spiegel 26 und Spiegel 25, der an dem Sensor,
Prismen 34 und 33 Fotowiderstände auf dem Zeugnis Paket enthalten.
20
Wenn die vereinbarte Position der SE und der SC Lichtstrahl wird geteilt in eine akute
Kante des Prismas 29 in zwei gleiche Teile. Durch Drehen des SE (dh der Spiegel 25)
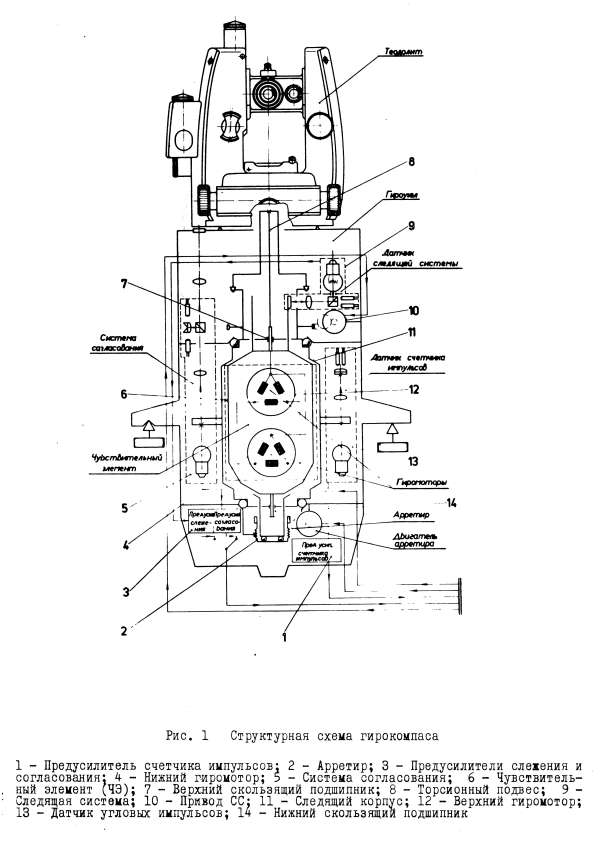
In Abb. 7. Schematische Darstellung des Kreiselkompass 1G11:
1 - giromotor 2 - Schraube, 3, 4 - Backen, 5, 8 - Gang, 6, 11 - Motor 7 -
Sensorelement, 9 - Torsion, 10, 14 - Bearing, 12 - Wagen, 13 -
Witness Gebäude, 15 - horizontalen Kreis, 16 - Teleskop, 17 - Projektion
Kanal, 18 - Anvisieren des Kopfes: 19 - Rack-Installationsanleitung, Kompass, 20 - die Marke;
21 - Blick 22 - Schneckengetriebe 23 - Worm, 24 - Dreifuss, 25, 26 - Spiegel, 27, 28 -
Objektiv: 29 - Prisma, 30 - Kondensator, 31 - Licht, 32 - fangen Sie das Schwungrad;
33 - Fotowiderstand, 34 - mit Prisma-Objektiv, 35 - Schraube Unterlegscheibe, 36 - Fang;
37 - Korps girouzla, 38 - Schraube, 39 - Loch für das Okular des optischen Tubus
Plumb, 40 - Glühlampe, 41 - mikroobektiv.
Rarität: militärischer Artillerie Kreiseltheodolit, Gyrotheodolite Gi-E1!
Ги-Е1 Артиллерийские гирокомпасы
link wikipedia: Kreiseltheodolit
Der GI-E1 ist ein militärischer Kreiseltheodolit für die Artillerie. Das Herzstück des Kreiseltheodoliten (auch Vermessungskreisel oder Gyrotheodolit genannt) bildet ein kardanisch aufgehängtes Pendel in welchem ein elektrisch angetriebener Kreisel rotiert, der eine präzise Richtungsweisung im Raum ermöglicht. Diese Nordweisung des Kreisels bildet die Referenz für die Ausrichtung und Orientierung des aufgesetzten Theodoliten.
Die Kreiseltheodoliten arbeiten sehr präzise und sind dank des Kreiselprinzips unabhängig vom magnetischen Nordpol der Erde.
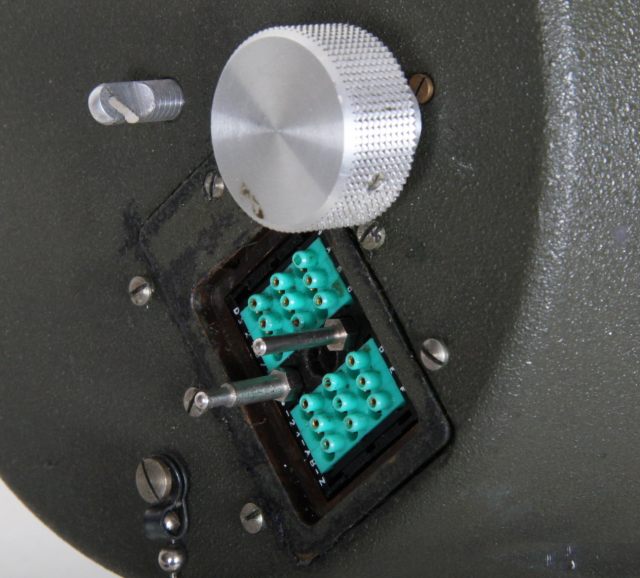
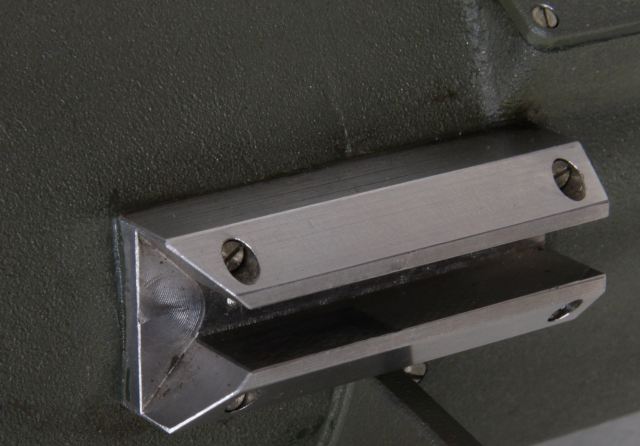
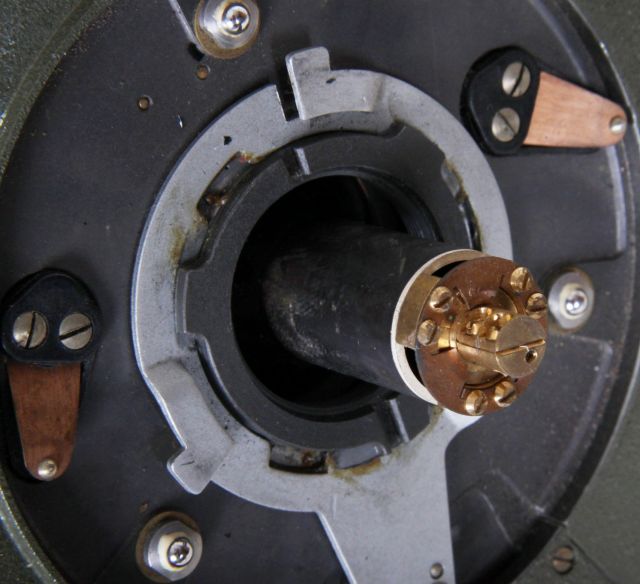
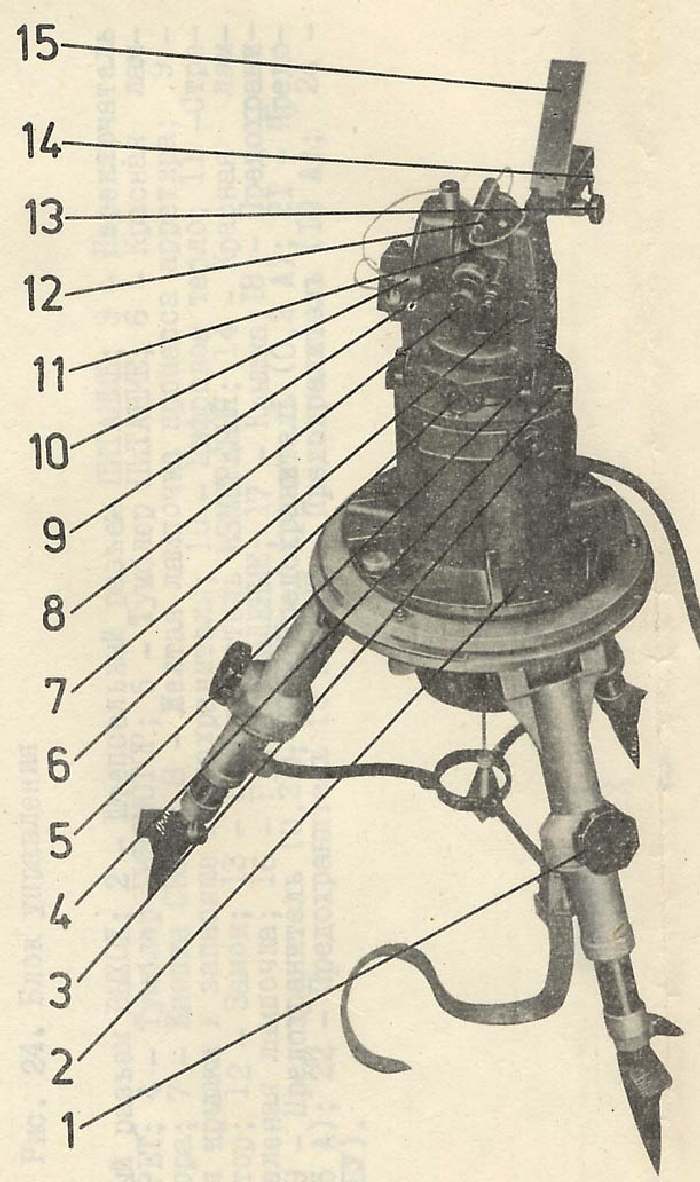
Die Rotationsachse des Kreiselteodoliten richtet sich unter dem Einfluss der Schwerkraft und der Erddrehung auf Astronomisch-Nord aus. In diesen richtungsgebenden Teil, dem sogenannten Kreisel ( siehe Bilder 4 bis 7 ), nimmt ein Theodolit ( siehe Bilder 1 bis 3 ) die Kreiselrichtung ab und setzt sie zu seinem Horizontalkreis in Beziehung.
In einer Einheit zusammengebaut ergeben Kreisel und Theodolit den Kreiseltheodoliten, oder der Kreisel kann auf den Theodoliten bei Bedarf aufgesetzt werden (Aufsatzkreisel).
Der Kreiseltheodolit GiE1 ist ein Spezialgerät für das Markscheidewesen, für die Vermessung von Tunneln oder auch für militärische Anwendungen.
Versand für diesen Kreiseltheodolit Gi-E1 mit seinem umfangreichen Zubehör auf Anfrage.
Skizzen des Kreiseltheodolit GI-E1
Einsatz eines Kreiseltheodoliten bei der NVA für einen Raketenstart. Hier wurden die Zielkoordinaten mittels der zugehörigen Fernsteuerung (rechts unten im Bild) automatisch an die Trägerrakete übermittelt.
Technische Daten, Kurzbeschreibung des Kreiseltheodolit GI-E1
Tatsächliche Peilung wird gemessen:
- Auf dem Boden (Kreiselkompass und Instrumente für astronomische
Beobachtungen);
- Auf der Karte (der rechte Rand der Karte - die Richtung der wahren Meridian).
Die magnetischen Azimut Am - entlang der horizontalen Winkel gemessen
im Uhrzeigersinn von 0 bis 00 auf 60-00 Kontrolle zwischen dem Nord-Richtung
der magnetische Meridian einem gegebenen Punkt und Richtung des Objekts (3b).
Die magnetischen Azimut wird durch Instrumente auf der Erde mit einem Magnetfeld gemessen
Pfeil (Kompass, Kompass, etc.)
Azimutwinkel α - eine horizontale Winkel entlang der gemessene
im Uhrzeigersinn von 0 bis 00 auf 60-00 Kontrolle zwischen dem Nord-Richtung
vertikalen Gitterlinien einem gegebenen Punkt und Richtung
Objekt. Azimutwinkel wird auf der Karte mit gemessenen
Artillerie-Bereich, ein Winkelmesser, hordouglomera.
Die magnetische Deklination δ - Winkel zwischen der wahren und
die magnetischen Meridian an einem bestimmten Punkt. Wenn eine Magnetnadel
weicht von der wahren Meridian nach Osten, die Deklination der östlichen
(Aufgenommen mit einem Plus-Zeichen), wenn im Westen - Westen (Fall mit
Minuszeichen).
Die Konvergenz der Meridiane γ - der Winkel zwischen der Richtung des Nordens
der wahre Meridian und die vertikale Linie des Rasters in dieser
der Punkt. Wenn die vertikale Rasterlinie weicht im Osten des wahren
Meridian, das Zusammenwachsen von Ost (aufgenommen mit einem Plus-Zeichen), wenn die
West - West (aufgenommen mit einem Minuszeichen).
Abänderung Richtung Montag - der Winkel zwischen der Richtung der N
vertikalen Gitterlinien und der Richtung des magnetischen
Meridian. Es ist gleich der algebraischen Differenz des Magnetfelds und
Konvergenz der Meridiane:
Mo = (± δ) - (± γ). (1.31)
Die Werte von Au, Am, und α wird durch die Formel berechnet:
Au = Am + (± δ); Am Au = - (± δ); α = Am + (± PI), (1.32)
Au = α + (± PI), Am = α - (± Mo); α = Ax - (± γ).
Die Werte von δ, γ, Mo von der Karte entfernt.
1.4. Füllen Sie Kreiselkompass
Die komplette Kreisel besteht normalerweise aus:
- Eigentlich der Kreisel;
- Stand Kreiselkompass;
- Netzteil (Sender);
- Batterie-Kreiselkompass;
- Elektroveha;
- Batterie-elektrovehi;
12
- Verlegen Kisten und Taschen;
- Ersatzteile;
- Technische Dokumentation.
1.5. Klassifikation der Artillerie Kreiselkompass
Durch die Art der Aufhängung:
- Liquid (AH, 1G5);
- Mit Torsionsaufhängung (1G9, 1G11, 1G17, GI-E1, 1G25, 1G25-1);
- Mit einer magnetischen Lagerung (1G40, 1G47).
Durch die Art der Anzeige:
- Digital (GI-E1, 1G40, 1G47);
- Auf der Extremität (1G5, 1G9, 1G11, 1G11N, 1G17);
- Kombiniert (1G25, 1G25-1).
Änderungen der Kreiselkompass 1G17 1G25-1-1 in der verwendeten
Panzer-Navigationsgeräte, ein Stativ und müssen nicht
installiert auf der Installations-Tabelle (z. B. BRDM-2px, Rahm).
1.6. Die Leistungsmerkmale der Kreiselkompass
Die wichtigsten Leistungsmerkmale der Kreiselkompass Darstellung
Lena in der Tabelle 1.
Tabelle 1
Anzahl der charakteristischen Art Kreiselkompass
p / n 1G11 1G17 1G25 1G40 1G47 GI-E1
Die Genauigkeit der
Azimutrichtung
1 (mittlerer Fehler):
- Zwei-Punkt-Umkehr 0-00,3 20 "0-00,5 0-00,5 0-00,5 ± 3,9
- Drei-Punkt-Umkehr 0-00,2 -----
- Vier-Punkt-Umkehr ------
Zeit zu bestimmen,
Azimut (die mit der Bereitstellung,
2 von Gyro):
- 2-Punkt-Umkehr 12 min 12 min 10 min 7 min 4 min -
- 3-Punkt-Umkehr 16 Minuten -----
- 4 Punkte Reversion ----- 7 min
3 Feld 2ω 3 ° 3 ° 3 ° 3 ° 3 ° 2 ° 30 '
4 Vergrößerung GT 12,6 x 12,6 x 12,6 x 12,6 x 12,6 x 8x
5 Temperaturbereich
von ± 50 ° ± 50 ° ± 50 ° ± 50 ° ± 50 ° ± 50 °
Set Gewicht, 115 kg 133 kg 80 kg 140 kg 140 kg 105 kg
6,:
- Gewicht des Kreisels in der Verpackung von 27 kg 40 kg ----
- Gewicht des Kreisels ohne Stapeln 20 kg - 23 kg 37,4 kg 16,6 kg -
M und P e und h e. Mittlerer Fehler ungefähr gleich zwei Drittel der mittleren quadratischen Fehlers.
13
KAPITEL 2. Hintergrund der Theorie von Kreiseln
2.1. Die Parameter und die Bewegungsgleichung des Kreisels
Drei-Stufen-freien Kreisels hat die Möglichkeit der Revolution in
drei Ebenen. Diese Drehung wird durch eine spezielle Art der Konstruktion gewährleistet
Drei-Stufen-Federung.
Drei-Stufen-Gyroskop (Abb. 2a) hat die folgende Achse:
- Die Hauptachse des Kreisels X - Drehachse symmetrischen
Trägheitskörper (durch den geometrischen Mittelpunkt);
- Präzessionsachse Z - vertikale Achse kardanisch in
Lageraußenring;
- Axis Stabilisierung Y - horizontale Achse kardanisch in
Lagerbasis.
Im freien Kreisels, sind alle drei Achsen senkrecht zueinander und
in einem Punkt schneiden. An diesem Punkt, der Schwerpunkt des Rotors
und kardanischer Ringe. Die Reibung in den Lagern der Achsen der Suspension aus der freien
Kreisel ist klein (Null). Wenn der Rotor frei
Gyroscope ankündigen schnelle Drehbewegung (Rotation) um die
seiner Hauptachse, wird es gyroskopischen Eigenschaften:
- Stabilität;
- Präzession;
- Gyroscopic Reaktion.
Nachhaltigkeit - die grundlegende Eigenschaft eines Kreisels. Die Hauptdrehachse
bemüht sich, seine gegenwärtigen und ursprünglichen Position zu halten
räumlich konstant. Die Stabilität des Gyroskop
größer, je größer sein Drehimpuls:
H = j ⋅ Ω, (2.1.1)
wo J - Trägheitsmoment um die Achse seiner Zeit; Ω - eckig
Rotordrehzahl.
Drehimpuls - eine Vektorgröße, die Richtung seiner
bestimmt durch die Seite des Rotors.
Die Stabilität wird auch durch den Grad des Gleichgewichts beeinflusst
Rotor sowie der Reibungskoeffizient in seiner Suspension.
Präzession - die Abweichung der Hauptachse des Kreisels zur Seite,
senkrecht zu der Richtung des Aufpralls der störenden Kraft.
Um die Richtung der Geschwindigkeit und Richtung der Präzession zu bestimmen
betrachten die Bewegung im Bild. 4a.
Die positive Richtung des Vektors H bezieht sich auf
Drehung des Rotors des Kreisels ist ersichtlich, gegen den Uhrzeigersinn werden. Vektor
auf einen Punkt, das heißt die Pole des Kreisels.
14
a) b)
In Abb. 4. Parameter des Drei-Stufen-Bewegung des Kreisels:
a) Die Richtung des Präzessionsdrehzahl und b) die Kreiselmomente und Kraftmomente
Trägheit.
Anwendbar auf den Vektor H Störkraft FB. Das Moment dieser Kraft
In der M auf der anderen Seite gesendet werden (in der Polstärke), die unter ihrem Einfluss
Rotationsachse des Kreisels sichtbar wäre gegen den Uhrzeigersinn haben. Unter
Im Moment ist die Wirkung von M wird sich ändern Schwung
Bewegung des Kreisels:
dH
= MW. (2.1.2)
dt
Aus der elementaren Vektor des Dreiecks haben wir:
dH = H ⋅ dα, (2.1.3)
wo dα - ein unendlich kleiner Winkel der Präzession.
Die Geschwindigkeit der Veränderung in der Präzessionswinkel ω ist die Ableitung von α:
dα
= Ω. (2.1.4)
dt
Setzt man in Gleichung (2) (3) und (4), erhalten wir:
In der M = H ⋅ ω. (2.1.5)
Aus den theoretischen Mechanik bekannt ist, dass das Vektorprodukt
alle Vektoren senkrecht zueinander sind. Die Richtung des Vektors ω ist
senkrecht zu der Ebene, in der die Vektoren in T und H:
M
&ohgr; p = B. (2.1.6)
H
Bereiche der Präzession wird durch die Regel bestimmt: die Aktion
Pol der angelegten Kraft des Kreisels ist der kürzeste Abstand der
Polstärke.
Gyroscopic Reaktion - die Entstehung eines freien Kreisels
unter dem Einfluß eines künstlich durch die Präzessionsbewegung erstellt
Da S, gleich in Größe und umgekehrter Richtung zu
15
Stören der Zeit, würde das zu einer Präzession
Bewegung:
S =-M B = - H ⋅ ω. (2.1.7)
Betrachten wir die Gleichungen der Bewegung des Kreisels, mit Abb. 4b.
Führen Sie die Differentialgleichungen der Bewegung des Kreisels enthalten
nichtlinearen Terme, und ihre Lösung kann nur auf der Grundlage gefunden werden
Näherungsverfahren verwenden. Allerdings zeigt die Analyse, dass mit
hohen Grad an Genauigkeit die Lösung dieser Gleichungen gefunden werden
wenn wir ignorieren die nichtlinearen Terme. Dies wird durch die Tatsache erklären, dass
moderne technische Gyros:
- Entlang der Z-Achse des Kreisels in der vertikalen Ebene durch den Winkel Bewegen
β klein genug ist;
- Winkelgeschwindigkeit von α und β sind auch relativ klein.
&&
Daher gehen wir davon aus, daß die Sünde β = β, cos β = β, φ = Ω = const.
Dann wird das System von Differentialgleichungen der Bewegung des Kreisels
kann wie folgt geschrieben werden:
&&
A 0 ⋅ β ⋅ α + H = M x; ⎫
& ⎪
& ⎬, (2.1.8)
B0 ⋅ α - H ⋅ β = M η, ⎪
&& ⎭
wobei A 0 = A + A1, B0 = B + B1 + B2;
A, B - äquatorialen Trägheitsmomente des Rotors relativ zu den Achsen X
und Y sind;
A1, B1 - Trägheitsmomente des Innenrings relativ zu der Suspension
Achsen X und Y sind;
H = C ⋅ Ω - der Drehimpuls der Trägheit des Rotors;
C - axiale Trägheitsmoment des Rotors;
MX, MY - Momente der äußeren Kräfte, die auf den Kreisel
relativ zu seiner Achse.
Gleichung (2.1.8) ist ein System von Gleichungen technische
Bewegung des Kreisels um einen festen Punkt.
&&
In dem System (2.1.8)-Komponenten der Momente A 0 ⋅ β ⋅ α und B0
&&
&
sind die Trägheitsmomente Kräfte, und H und H ⋅ α ⋅ β - gyroskopischen Momente.
&
Technische Gleichungen sind für die praktische Verwendung und
hinreichende Genauigkeit.
Es sollte berücksichtigt werden, dass die oben genannten Spezifikationen der Gleichung
für den Fall gemacht, wo der Winkel β klein genug ist. Für große
Werte des Winkels β der Gleichung kann in den technischen Daten wie folgt geschrieben werden:
&&
A 0 ⋅ β + H ⋅ α ⋅ cos β = M x; ⎫
& ⎪
⎬ (2.1.9)
&&
B0 ⋅ α - H ⋅ β ⋅ cos β = M η. ⎪
&& ⎭
&&
In den Berechnungen vernachlässigt den inertialen Begriffe A 0 ⋅ β, B0 ⋅ α und &&
werden verkürzt technischen Gleichungen:
16
H ⋅ α = M; ⎪
& ⎫
& ⎬ (2.1.10)
-. H ⋅ β = M η ⎪
⎭
Diese Gleichungen liefern die notwendige Genauigkeit der Berechnungen mit
Bestimmen Sie die Fehler der modernen Artillerie gyroskopischen
Geräte.
2.2. Das Prinzip des Kreisels
Bestimmung der Azimuth-Richtung durch Orientierung
Kreisel wird auf die Bestimmung gyroskopischen Weise reduziert
der wahren Meridian-und Azimut-Berechnung Orientierung
Richtung.
Die Richtung der wahren Meridian mit dem Kreisel
Beobachtungen Vibrationssensor. Empfindlich
(SE) (5a) ist ein Pendel gyroskopischen, dh Gyroskop, das
Von der Mitte der Schwerkraft, die unter dem Punkt der Unterbrechung. In der Schaukel
Hauptachse des Kreisels X-X Kreisel führt harmonische
Schwankungen bezüglich der Ebene des Meridians. Dieses Phänomen ist
die folgenden Eigenschaften des Kreisels:
1) Die Hauptachse des Kreisels X-X zielt darauf ab, behalten unverändert ihre
Position im Welt-Raum;
2) wenn die Achse x-x zu befestigen ein Paar von Kräften F-F (5b), die Achse des Kreisels
Unter der Wirkung dieses Paar von Kräften wird gedreht
(Precess) in der Ebene P senkrecht zu der Ebene N.
Die Richtung der Präzession mit der Richtung der Kraft F zusammenfallen,
um 90 ° in der Drehrichtung des Rotors des Kreisels.
a) b)
In Abb. Fünf. Das Sensorelement (a) und pretsessirovanie Kreiselachse (b)
17
Lassen Sie die Anfangszeit-Achsen-Gyroskop horizontal ist, und
befindet sich in der Äquatorialebene, dh in der Richtung
"Ost-West" (Abbildung 6, die Position I). An dieser Stelle, vorbei an der Linie
durch die Suspension Punkt D und dem Schwerpunkt C SE, mit der vertikalen
Raum, dh Reaktion auf die Aussetzung der Q und R sind die Gravitationskraft auf einer geraden Linie
und in entgegengesetzten Richtungen, dh gerichteten bilden keinen Punkt.
In Abb. 6. Das Funktionsprinzip des Kreisels Pendel
Durch die tägliche Rotation der Erde nach einem Zeitraum von
Zeit einen bestimmten Winkel drehen. Die Achse des Kreisels in der ersten
Eigentum (Eigentum der Stabilisierung) bleibt parallel zu seiner
ursprünglichen Position und nimmt Stellung II. In diesem Fall wird die Kraft F
und Q bilden einen Punkt um die Hauptachse des Kreisels X-X, die
führen Präzession um die vertikale SE, so dass das Ende sein wird
auf uns zu wenden, das heißt, im Norden, und am Ende - nach Süden.
Mit einer weiteren Drehung der Erde wird am Ende ein
über dem Horizont steigt, und am Ende - nach unten. Wert
Dynamik des Paars von Kräften und die Drehzahl der Sensor um die
Vertikal wird zunehmen und erreichte ihr Maximum
Wert, wenn die Achse des Kreisels in der Meridianebene (Lage sein
III). In dieser Position wird das Ende einer Kreiselachse maximal sein
erhöht über dem Horizont, und am Ende - wie ausgelassen wird (die Art von
Pfeil F). Mit weiteren Drehung der Erdachse Kreisel kommen aus der
Meridianebene und nehmen Sie die Position IV. Das Ende der Achse des Kreisels wird sein
Übersiedlung in den Westen, und am Ende - nach Osten.
In der Zukunft, in Verbindung mit der Drehung der Erde Enden A und B werden
näher an der Ebene des Horizonts, und natürlich wird eine Zeit kommen
18
Wenn die Gyroskop-Achse mit der Ebene des Horizonts (Position V). In
Diese Position ist die Zeit ein Paar von Kräften Null, dh kommt ein Punkt
Reversion. Nach einer gewissen Zeit (in Übereinstimmung mit
erste Eigenschaft eines Kreisels) SE nimmt die Position VI.
In dieser Position hat das Ende der A-Achsen-Gyrosensor unter weggelassen werden
Ebene des Horizonts, und am Ende wird über den Horizont erhoben werden
(Das Gegenteil der Situation II), dh Sensorelement wird
bewegen (präzedieren) in die entgegengesetzte Richtung.
Somit wird die SE machen das Pendel Kreiselkompass
periodischen Schwingungen relativ zur Ebene des Meridians. Zeit
Schwingungen hängt von der geographischen Breite und der Umgebungstemperatur (siehe
adj. 1-4). Da der Abstand vom Äquator der Schwingungsperiode Anstieg
ting.
Im Allgemeinen werden die Präzessionsbewegung Schwingungen aufgrund der Anwesenheit von SE
verschiedenen Widerstandskräfte, vor allem die Unterstützung von Flüssigkeit,
überholt sind und nicht in Bezug auf symmetrische
die Ebene des Meridians. In dem Verfahren der Bestimmung des Azimuts dieser Zerfall
zu berücksichtigen, vorgesehen sein, dass die Verfahren zur Bestimmung
verschiedenen Azimut Kreiselkompass.
In der Kreiselkompass und 1G9 1G11 keine Wartung Flüssigkeit
Sensorelement auf einer Torsionsaufhängung Band suspendiert
Typen. Um den entgegenzuwirken Torsionsmoment auf die Schwingungs beseitigen
SE-Tracking-System verwendet, so dass die Dämpfung von Schwingungen
SE minimiert wird.
An Stellen, wo der Betrachter nimmt die Beendigung des SE-Verkehr
(Stopp), ändert die Achse des Kreisels die Richtung der Bewegung
das Gegenteil. Deshalb werden diese Punkte genannt Umkehrpunkten.
Wenn der Kreisel-Pendel ist nicht jeder Widerstand Kraft, die
Reversion Punkt symmetrisch zur Ebene liegen
Meridian. Unter diesen Umständen, um zu bestimmen, die Richtung der wahren
Meridian ist genug, um die zwei benachbarten Umkehrpunkten fixieren und nehmen
dazwischen.
Fixieren der Positionen der Wendepunkte ist, indem durchgeführt
goniometrischen Lesungen auf der Skala. Die Anzahl der Richtung entspricht,
der wahre Meridian, ist das arithmetische Mittel aus den Ablesungen
Rückfall in die Punkte.
Um grobe Fehler zu beseitigen und verbessern die Genauigkeit der durchschnittlichen Anzahl,
entsprechend der Richtung der wahren Meridians, bestimmt durch
drei, vorzugsweise vier-Punkt-Umkehr.
In 1G5 Kreiselkompass empfindliche Element schwimmt in der Flüssigkeit.
Flüssigkeitsreibung verursacht Dämpfung SE. Es
Verfahren berücksichtigt die Dämpfung in der Definition der Azimut.
19
KAPITEL 3. ARTILLERY Kreiselkompass 1G11
3.1. Beschreibung des Gerätes Gerät gesetzt Kreiselkompass 1G11
Kit 1G11 Kreiselkompass Geräte gezeigt. 6. Richtig
Kreiselkompass besteht aus girouzla und richten den Kopf.
Girouzel besteht aus folgenden Teilen:
- Sensor 7;
- Servo-Gehäuse 13;
- Dreifuss 24;
- Block-Lager 10;
- Mechanismus zur Führung in Azimut 22, 23;
- Rechtssache 37.
In Abb. 6. Füllen Sie Kreiselkompass 1G11:
1 - Sichtung Kopf, 2 - Stopfbuchse für den Kreisel, 3 - Batterie
Akku 12SLM-28, 4 - Stromversorgung: 5 - für die Fernbedienung Griff
Bewegen des Grid Reference System Kreisel, 6 - girouzel 7 - Stativtasche
Kreiselkompass, 8 - eine Kiste mit Ersatzteilen, 9 - Batteriekasten AC-8, 10 - AK-Batterie
8, 11 - elektroveha, 12 - Urteil elektrovehi 13 - Stativ.
Das Sensorelement (7) girouzla wirkt als Kreisel-
und das Pendel ein Zylinder ist, der untere Teil der
angeschlossene Kamera giromotorom 1. Das Sensorelement ist suspendiert
auf einem Förderband Wagen 9 auf den Torsionsstab 12, der entlang der Achse bewegen kann
ZZ Zeuge in dem Fall.
In den Zeugenstand (SC) sind Sensor-Tracking-System fixiert,
Käfighaltung Mechanismus und eine horizontale Reichweite von 15. Sensor-Tracking
System besteht aus einem Rohr 31, der Kondensator 30, das Prisma 29, Linse 27,
28, Spiegel 26 und Spiegel 25, der an dem Sensor,
Prismen 34 und 33 Fotowiderstände auf dem Zeugnis Paket enthalten.
20
Wenn die vereinbarte Position der SE und der SC Lichtstrahl wird geteilt in eine akute
Kante des Prismas 29 in zwei gleiche Teile. Durch Drehen des SE (dh der Spiegel 25)
In Abb. 7. Schematische Darstellung des Kreiselkompass 1G11:
1 - giromotor 2 - Schraube, 3, 4 - Backen, 5, 8 - Gang, 6, 11 - Motor 7 -
Sensorelement, 9 - Torsion, 10, 14 - Bearing, 12 - Wagen, 13 -
Witness Gebäude, 15 - horizontalen Kreis, 16 - Teleskop, 17 - Projektion
Kanal, 18 - Anvisieren des Kopfes: 19 - Rack-Installationsanleitung, Kompass, 20 - die Marke;
21 - Blick 22 - Schneckengetriebe 23 - Worm, 24 - Dreifuss, 25, 26 - Spiegel, 27, 28 -
Objektiv: 29 - Prisma, 30 - Kondensator, 31 - Licht, 32 - fangen Sie das Schwungrad;
33 - Fotowiderstand, 34 - mit Prisma-Objektiv, 35 - Schraube Unterlegscheibe, 36 - Fang;
37 - Korps girouzla, 38 - Schraube, 39 - Loch für das Okular des optischen Tubus
Plumb, 40 - Glühlampe, 41 - mikroobektiv.
Истинный азимут измеряется:
– на местности (гирокомпасами и приборами для астрономических
наблюдений);
– по карте (правый край карты – направление истинного меридиана).
Магнитный азимут Ам – горизонтальный угол, измеряемый по ходу
часовой стрелки от 0-00 до 60-00 ДУ между северным направлением
магнитного меридиана данной точки и направлением на объект (рис. 3, б).
Магнитный азимут измеряется на местности приборами с магнитной
стрелкой (компас, буссоль и др.)
Дирекционный угол α – горизонтальный угол, измеряемый по ходу
часовой стрелки от 0-00 до 60-00 ДУ между северным направлением
вертикальной линии координатной сетки данной точки и направлением на
объект. Дирекционный угол измеряется по карте с помощью
артиллерийского круга, транспортира, хордоугломера.
Магнитное склонение δ – угол между направлением истинного и
магнитного меридианов в данной точке. Если магнитная стрелка
отклоняется от истинного меридиана к востоку, то склонение восточное
(учитывается со знаком плюс), если к западу – западное (учитывается со
знаком минус).
Сближение меридианов γ – угол между северным направлением
истинного меридиана и вертикальной линией координатной сетки в данной
точке. Если вертикальная линия сетки отклоняется к востоку от истинного
меридиана, то сближение восточное (учитывается со знаком плюс), если к
западу – западное (учитывается со знаком минус).
Поправка направления ПН – угол между северным направлением
вертикальной линии координатной сетки и направлением магнитного
меридиана. Она равна алгебраической разности магнитного склонения и
сближения меридианов:
ПН = (±δ) – (±γ). (1.31)
Значения Аи, Ам и α вычисляют по формулам:
Аи = Ам + (±δ); Ам = Аи – (±δ); α = Ам + (±ПН); (1.32)
Аи = α + (±ПН); Ам = α – (±ПН); α = Аи – (±γ).
Значения δ, γ, ПН снимают с карты.
1.4. Комплект гирокомпаса
В комплект гирокомпаса обычно входят:
– собственно гирокомпас;
– штатив гирокомпаса;
– блок питания (преобразователь);
– аккумуляторная батарея гирокомпаса;
– электровеха;
– аккумуляторная батарея электровехи;
12
– укладочные ящики и чехлы;
– ЗИП;
– техническая документация.
1.5. Классификация артиллерийских гирокомпасов
По типу подвеса:
– жидкостные (АГ, 1Г5);
– с торсионным подвесом (1Г9, 1Г11, 1Г17, ГИ-Е1, 1Г25, 1Г25-1);
– с магнитным подвесом (1Г40, 1Г47).
По способу индикации:
– цифровая (ГИ-Е1, 1Г40, 1Г47);
– по лимбу (1Г5, 1Г9, 1Г11, 1Г11Н, 1Г17);
– комбинированная (1Г25, 1Г25-1).
Модификации гирокомпасов 1Г17-1 и 1Г25-1 используются в составе
танковой навигационной аппаратуры, штатива не имеют и
устанавливаются на установочном столике (например, БРДМ-2рх, РХМ).
1.6. Тактико-технические характеристики гирокомпасов
Основные тактико-технические характеристики гирокомпасов представ-
лены в таблице 1.
Таблица 1
№ Характеристика Тип гирокомпаса
п/п 1Г11 1Г17 1Г25 1Г40 1Г47 ГИ-Е1
Точность определения
азимута направления
1 (срединная ошибка):
– по двум точкам реверсии 0-00,3 20" 0-00,5 0-00,5 0-00,5 ±3,9
– по трем точкам реверсии 0-00,2 – – – – –
– по четырем точкам реверсии – – – – – –
Время для определения
азимута (с учетом развертыва-
2 ния гирокомпаса):
– по 2 точкам реверсии 12 мин 12 мин 10 мин 7 мин 4 мин –
– по 3 точкам реверсии 16 мин – – – – –
– по 4 точкам реверсии – – – – – 7 мин
3 Угловое поле 2ω 3° 3° 3° 3° 3° 2°30"
4 Видимое увеличение ГТ 12,6х 12,6х 12,6х 12,6х 12,6х 8х
5 Температурный диапазон
работы ±50° ±50° ±50° ±50° ±50° ±50°
Вес комплекта, 115 кг 133 кг 80 кг 140 кг 140 кг 105 кг
6 в том числе:
– вес гирокомпаса в укладке 27 кг 40 кг – – – –
– вес гирокомпаса без укладки 20 кг – 23 кг 37,4 кг 16,6 кг –
П р и м е ч а н и е . Срединная ошибка приближенно равна 2 / 3 средней квадратической ошибки.
13
ГЛАВА 2. ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ГИРОСКОПИИ
2.1. Параметры и уравнение движения гироскопа
Трехстепенной свободный гироскоп имеет возможности вращения в
трех плоскостях. Это вращение обеспечивается особого вида конструкцией
трехстепенного подвеса.
Трехстепенной гироскоп (рис. 2, а) имеет следующие оси вращения:
– главную ось гироскопа X – ось вращения симметричного
инерционного тела (проходит через геометрический центр);
– ось прецессии Z – вертикальная ось карданова подвеса в
подшипниках внешнего кольца;
– ось стабилизации Y – горизонтальная ось карданова подвеса в
подшипнике основания.
В свободном гироскопе все три оси взаимно перпендикулярны и
пересекаются в одной точке. В этой точке находится центр тяжести ротора
и карданных колец. Трение осей подвеса в подшипниках у свободного
гироскопа должно быть малым (равным нулю). Если ротору свободного
гироскопа сообщить быстрое вращательное движение (вращение) вокруг
его главной оси, он приобретает гироскопические свойства:
– устойчивость;
– прецессию;
– гироскопическую реакцию.
Устойчивость – основное свойство гироскопа. Главная ось вращения
стремится сохранить заданное или первоначальное положение
неизменным в мировом пространстве. Устойчивость гироскопа тем
больше, чем больше его кинетический момент:
H = j⋅Ω, (2.1.1)
где j – момент инерции ротора вокруг его оси времени; Ω – угловая
скорость вращения ротора.
Кинетический момент – векторная величина, направление ее
определяется стороной вращения ротора.
На устойчивость оказывает влияние также степень сбалансированности
ротора, а также коэффициент трения в его подвесе.
Прецессия – отклонение главной оси гироскопа в сторону,
перпендикулярную направлению воздействия возмущающей силы.
Для определения направления скорости и направления прецессионного
движения рассмотрим рис. 4, а.
Положительным направлением вектора H является то, откуда
вращение ротора гироскопа будет видно против часовой стрелки. Вектор
направлен в точку, которую называют полюсом гироскопа.
14
а) б)
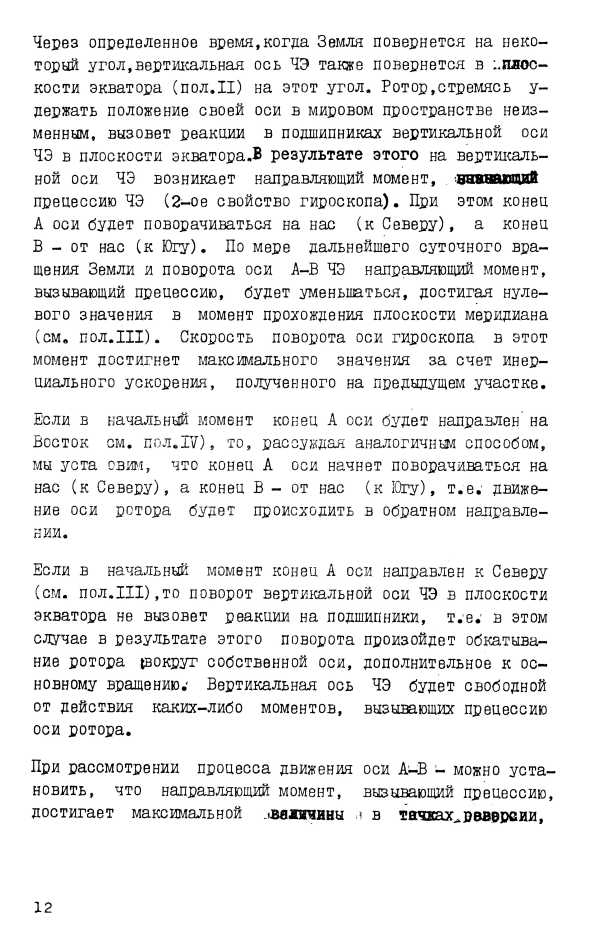
Рис. 4. Параметры движения трехстепенного гироскопа:
а) Направление скорости и прецессии; б) Гироскопические моменты и моменты сил
инерции.
Приложим к вектору H возмущающую силу FВ . Момент этой силы
M В будет направлен в ту сторону (в полюс силы), откуда под ее действием
поворот оси гироскопа был бы виден против часовой стрелки. Под
действием момента M В произойдет изменение момента количества
движения гироскопа:
dH
= MВ. (2.1.2)
dt
Из элементарного векторного треугольника имеем:
dH = H ⋅ dα , (2.1.3)
где dα – бесконечно малая величина угла прецессии.
Скорость изменения угла прецессии ω есть производная от α :
dα
=ω . (2.1.4)
dt
Подставив в уравнение (2) уравнения (3) и (4), получим:
M В = H ⋅ω . (2.1.5)
Из теоретической механики известно, что в векторном произведении
все векторы взаимно перпендикулярны. Направление вектора ω будет
перпендикулярно к плоскости, в которой лежат векторы M В и H :
M
ωП = В . (2.1.6)
H
Направления прецессии определяется правилом: под действием
приложенной силы полюс гироскопа идет по кратчайшему расстоянию к
полюсу силы.
Гироскопическая реакция – возникновение у свободного гироскопа
под действием искусственно создаваемого прецессионного движения
момента S , равного по величине и обратного по направлению тому
15
возмущающему моменту, который бы вызвал это прецессионное
движение:
S = −M В = − H ⋅ ω . (2.1.7)
Рассмотрим уравнения движения гироскопа, пользуясь рис. 4, б.
Полные дифференциальные уравнения движения гироскопа содержат
нелинейные члены, и их решение может быть найдено только на основе
использования приближенных методов. Однако, как показывает анализ, с
высокой степенью точности решение этих уравнений может быть найдено,
если отбросить нелинейные члены. Это объясняется тем, что в
современных технических гироскопах:
– перемещение гироскопа по оси Z в вертикальной плоскости по углу
β достаточно невелико;
– угловые скорости α и β также сравнительно малы.
& &
Отсюда примем, что sin β = β , cos β = β , ϕ = Ω = const .
Тогда система дифференциальных уравнений движения гироскопа
может быть записана в следующем виде:
&&
А 0 ⋅ β + Н ⋅ α = М х ;⎫
& ⎪
& ⎬, (2.1.8)
В0 ⋅ α − Н ⋅ β = М η , ⎪
&& ⎭
где А 0 = А + А1 ; В0 = В + В1 + В 2 ;
А, В – экваториальные моменты инерции ротора относительно осей Х
и У соответственно;
А1, В1 – моменты инерции внутреннего кольца подвеса относительно
осей Х и У;
H = C ⋅ Ω – кинетический момент инерции ротора;
С – осевой момент инерции ротора;
MX , MY – моменты внешних сил, действующие на гироскоп
относительно соответствующих осей.
Выражение (2.1.8) представляет собой систему технических уравнений
движения гироскопа около неподвижной точки.
&&
В системе (2.1.8) составляющие моменты А 0 ⋅ β и В0 ⋅ α представляют
&&
&
собой моменты сил инерции, а Н ⋅ α и Н ⋅ β – гироскопические моменты.
&
Технические уравнения удобны для практического использования и
обеспечивают достаточную точность.
Следует иметь в виду, что приведенные технические уравнения
составлены для случая, когда угол β достаточно мал. При больших
значениях угла β технические уравнения запишутся в следующем виде:
&&
А 0 ⋅ β + Н ⋅ α ⋅ сos β = M x ;⎫
& ⎪
⎬ (2.1.9)
&&
B0 ⋅ α − H ⋅ β ⋅ cos β = M η . ⎪
&& ⎭
&&
При расчетах пренебрегают инерционными членами А 0 ⋅ β , В0 ⋅ α и &&
пользуются укороченными техническими уравнениями:
16
Н ⋅ α = Мх ; ⎪
& ⎫
& ⎬ (2.1.10)
− Н ⋅ β = М η .⎪
⎭
Эти уравнения обеспечивают необходимую точность расчетов при
определении ошибок современных артиллерийских гироскопических
приборов.
2.2. Принцип действия гирокомпаса
Определение азимута ориентирного направления при помощи
гирокомпаса сводится к определению гироскопическим способом
положения истинного меридиана и вычислению азимута ориентирного
направления.
Направление истинного меридиана с помощью гирокомпаса находится
по наблюдениям колебаний чувствительного элемента. Чувствительный
элемент (ЧЭ) (рис. 5, а) представляет собой гиромаятник, т.е. гироскоп, у
которого центр тяжести С находится ниже точки подвеса. В маятниковых
гирокомпасах главная ось X–X гироскопа совершает гармонические
колебания относительно плоскости меридиана. Это явление обусловлено
следующими свойствами гироскопа:
1) главная ось гироскопа X–X стремится сохранить неизменным свое
положение в мировом пространстве;
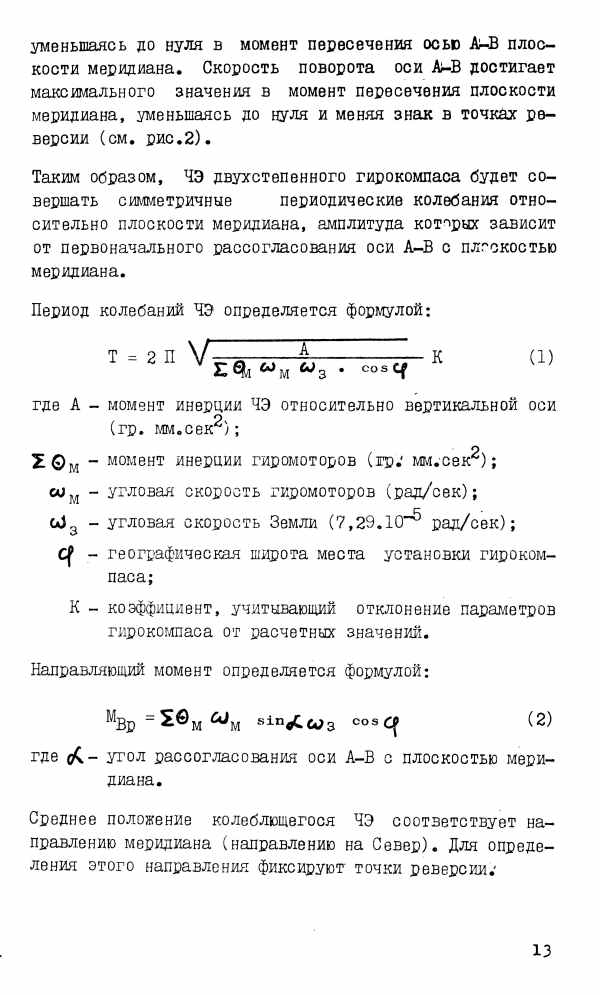
2) если к оси x–x приложить пару сил F–F (рис. 5, б), то ось гироскопа
под действием момента этой пары сил будет поворачиваться
(прецессировать) в плоскости Р, перпендикулярной к плоскости N.
Направление прецессии будет совпадать с направлением силы F,
повернутой на 90° в направлении вращения ротора гироскопа.
а) б)
Рис. 5. Чувствительный элемент (а) и прецессирование оси гироскопа (б)
17
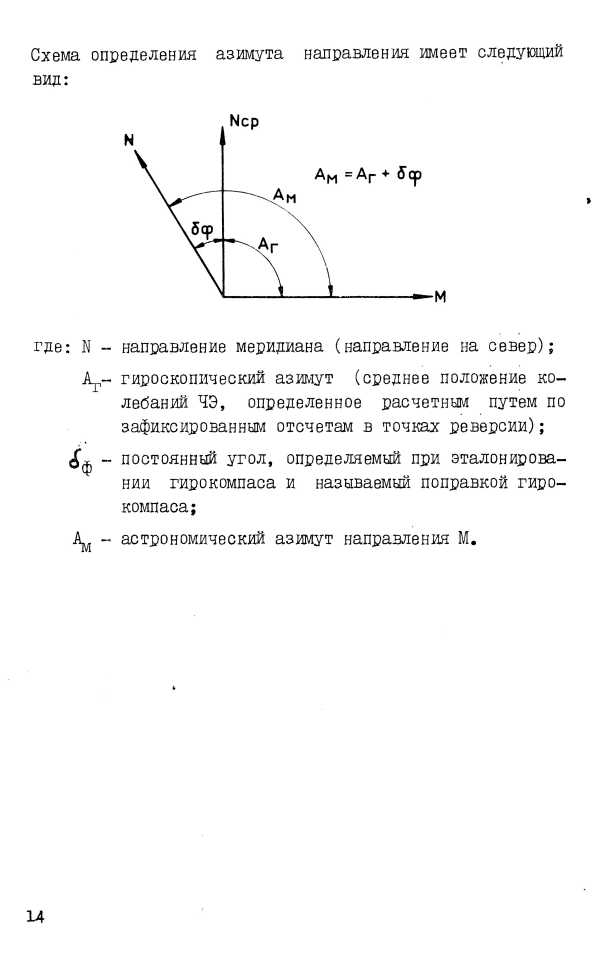
Пусть в начальный момент времени ось гироскопа горизонтальна и
расположена в плоскости экватора, т.е. ориентирована в направлении
“восток-запад” (рис. 6, положение I). В этот момент линия, проходящая
через точку подвеса D и центр тяжести С ЧЭ, совпадает с вертикалью
места, т.е. реакция подвеса Q и сила тяжести Р находятся на одной прямой
и направлены в противоположные стороны, т.е. не образуют момента.
Рис. 6. Принцип действия маятникового гироскопа
Вследствие суточного вращения Земля через некоторый промежуток
времени повернется на определенный угол. Ось гироскопа по первому
свойству (свойству стабилизации) останется параллельной своему
первоначальному положению и займет положение II. В этом случае силы Р
и Q образуют момент относительно главной оси гироскопа X–X, который и
вызовет прецессию ЧЭ вокруг вертикали, так что конец А будет
поворачиваться на нас, т.е. к северу, а конец В – к югу.
По мере дальнейшего суточного вращения Земли конец А будет
подниматься над плоскостью горизонта, а конец В – опускаться. Величина
момента пары сил и скорость поворота чувствительного элемента вокруг
вертикали будут увеличиваться и достигнут своего максимального
значения, когда ось гироскопа станет в плоскость меридиана (положение
III). В этом положении конец А оси гироскопа будет максимально
приподнят над горизонтом, а конец В – максимально опущен (вид по
стрелке F). По мере дальнейшего вращения Земли ось гироскопа выйдет из
плоскости меридиана и займет положение IV. Конец оси гироскопа А будет
двигаться на запад, а конец В – на восток.
В дальнейшем в связи с вращением Земли концы А и В будут
приближаться к плоскости горизонта и, очевидно, наступит такой момент,
18
когда ось гироскопа совпадет с плоскостью горизонта (положение V). В
этом положении момент пары сил будет равен нулю, т.е. наступит точка
реверсии. По истечении некоторого промежутка времени (в соответствии с
первым свойством гироскопа) ЧЭ займет положение VI.
В этом положении конец А оси гироскопа уже будет опущен под
плоскость горизонта, а конец В будет поднят над горизонтом
(противоположно положению II), т.е. чувствительный элемент начнет
двигаться (прецессировать) в противоположную сторону.
Таким образом, ЧЭ маятникового гирокомпаса будет совершать
периодические колебания относительно плоскости меридиана. Период
колебаний зависит от широты и температуры окружающей среды (см.
прил. 1-4). По мере удаления от экватора период колебаний увели-
чивается.
В общем случае прецессионные колебания ЧЭ ввиду наличия
различных сил сопротивления, в особенности поддерживающей жидкости,
носят затухающий характер и не являются симметричными относительно
плоскости меридиана. В процессе определения азимута эти затухания
необходимо учитывать, что и предусмотрено методиками определения
азимута различными гирокомпасами.
В гирокомпасах 1Г9 и 1Г11 отсутствует поддерживающая жидкость,
чувствительный элемент подвешен на торсионном подвесе ленточного
типа. Для исключения противодействующего момента торсиона на колеба-
ния ЧЭ применена следящая система, вследствие чего затухание колебаний
ЧЭ сведено к минимуму.
В точках, где наблюдатель воспринимает прекращение движения ЧЭ
(остановку), ось гироскопа изменяет направление движения на
противоположное. Поэтому эти точки и называются точками реверсии.
Если на гиромаятник не действуют никакие силы сопротивления, то
точки реверсии располагаются симметрично относительно плоскости
меридиана. В этих условиях для определения направления истинного
меридиана достаточно зафиксировать две смежные точки реверсии и взять
среднее между ними.
Фиксирование положений точек реверсии осуществляется путем снятия
отсчетов по угломерной шкале. Отсчет, соответствующий направлению
истинного меридиана, находится как среднее арифметическое из отсчетов
по точкам реверсии.
Для исключения грубых ошибок и повышения точности средний отсчет,
соответствующий направлению истинного меридиана, определяют по
трем, а лучше по четырем точкам реверсии.
В гирокомпасе 1Г5 чувствительный элемент плавает в жидкости.
Жидкостное трение обусловливает затухание колебаний ЧЭ. Это
затухание учитывается методикой работы по определению азимута.
19
ГЛАВА 3. АРТИЛЛЕРИЙСКИЙ ГИРОКОМПАС 1Г11
3.1. Описание устройства приборов комплекта гирокомпаса 1Г11
Комплект приборов гирокомпаса 1Г11 показан на рис. 6. Собственно
гирокомпас состоит из гироузла и визирной головки.
Гироузел имеет следующие части:
– чувствительный элемент 7;
– следящий корпус 13;
– трегер 24;
– блок подшипников 10;
– механизм наведения по азимуту 22, 23;
– корпус 37.
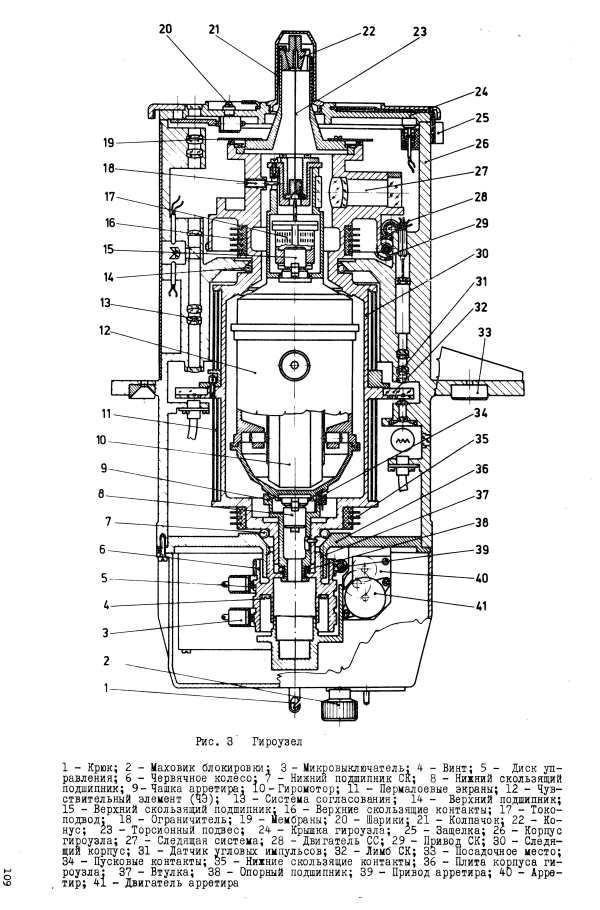
Рис. 6. Комплект гирокомпаса 1Г11:
1 – визирная головка; 2 – укладочный ящик для гирокомпаса; 3 – аккумуляторная
батарея 12СЛМ-28; 4 – блок питания; 5 – ручка для дистанционного управления
перемещением сетки отсчетной системы гирокомпаса; 6 – гироузел; 7 – чехол штатива
гирокомпаса; 8 – ящик с ЗИП; 9 – ящик для аккумуляторов АК-8; 10 – аккумулятор АК-
8; 11 – электровеха; 12 – чехол для электровехи; 13 – штатив.
Чувствительный элемент (рис. 7) гироузла выполняет роль гиро-
маятника и представляет собой цилиндр, к нижней части которого
прикреплена камера с гиромотором 1. Чувствительный элемент подвешен
на ленточном торсионе 9 к каретке 12, которая может перемещаться по оси
ZZ в следящем корпусе.
На следящем корпусе (СК) закреплены датчик следящей системы,
механизм арретирования и горизонтальный круг 15. Датчик следящей
системы состоит из лампы 31, конденсора 30, призмы 29, объективов 27,
28, зеркала 26 и зеркала 25, закрепленного на чувствительном элементе,
призм 34 и фотосопротивлений 33, закрепленных на следящем корпусе.
20
При согласованном положении ЧЭ и СК световой поток делится острым
ребром призмы 29 на две равные части. При повороте ЧЭ (т.е. зеркала 25)
Рис. 7. Принципиальная схема устройства гирокомпаса 1Г11:
1 – гиромотор; 2 – винт; 3, 4 – губки; 5, 8 – редуктор; 6, 11 – двигатель; 7 –
чувствительный элемент; 9 – торсион; 10, 14 – подшипник; 12 – каретка; 13 –
следящий корпус; 15 – горизонтальный круг; 16 – зрительная труба; 17 – проекционный
канал; 18 – визирная головка; 19 – стойка для установки ориентир-буссоли; 20 – марка;
21 – визир; 22 – червячная шестерня; 23 – червяк; 24 – трегер; 25, 26 – зеркало; 27, 28 –
объектив; 29 – призма; 30 – конденсор; 31 – лампа; 32 – маховик арретира;
33 – фотосопротивление; 34 – призма с линзой; 35 – резьбовая шайба; 36 – арретир;
37 – корпус гироузла; 38 – винт; 39 – отверстие для окулярной трубки оптического
отвеса; 40 – лампочка подсветки; 41 – микрообьектив.
Artikel 13 / 60
